[Radar SLAM] ― May 30, 2021
Radar Odometry Results on MulRan dataset
Radar
- Here, the radar means Navtech radar data.
- For details, see https://oxford-robotics-institute.github.io/radar-robotcar-dataset/
- Radar is robust to occlusions than LiDAR in urban sites.
Yeti Radar Odometry
- Paper
- Do We Need to Compensate for Motion Distortion and Doppler Effects in Spinning Radar Navigation? (ICRA 2021)
- Code
- https://github.com/keenan-burnett/yeti_radar_odometry
- Features
- implemented cen2018, cen2019 method with motion compensation
- Requirements
Tutorial: running Yeti on MulRan dataset
Results on MulRan dataset
- MulRan dataset
- MulRan: Multimodal Range Dataset for Urban Place Recognition (ICRA 2019)
- https://sites.google.com/view/mulran-pr/dataset
- Methods
- Cen2018: Precise ego-motion estimation with millimeter-wave radar under diverse and challenging conditions (ICRA 2018)
- Cen2019: Radar-only ego-motion estimation in difficult settings via graph matching (ICRA 2019)
- Result captures
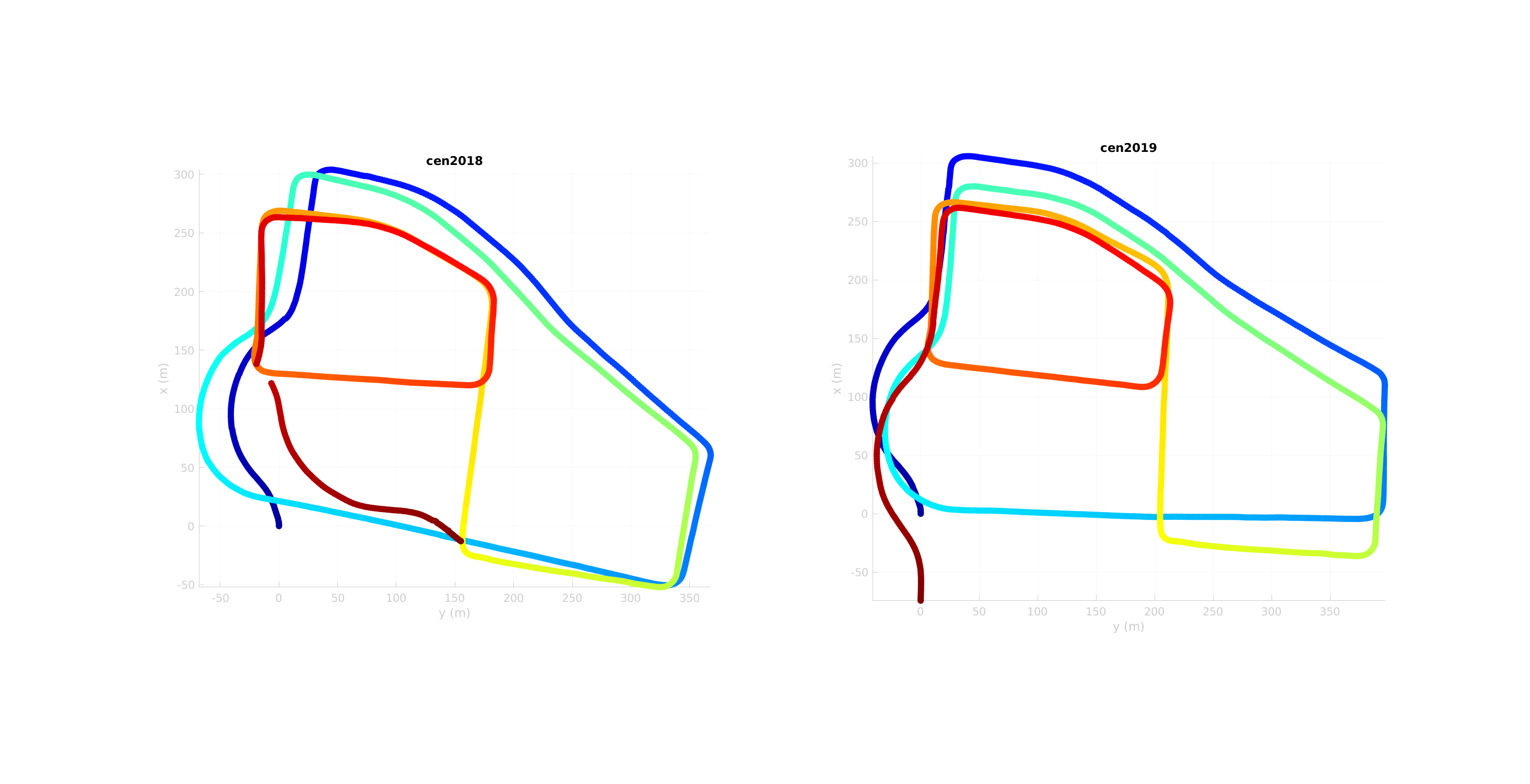
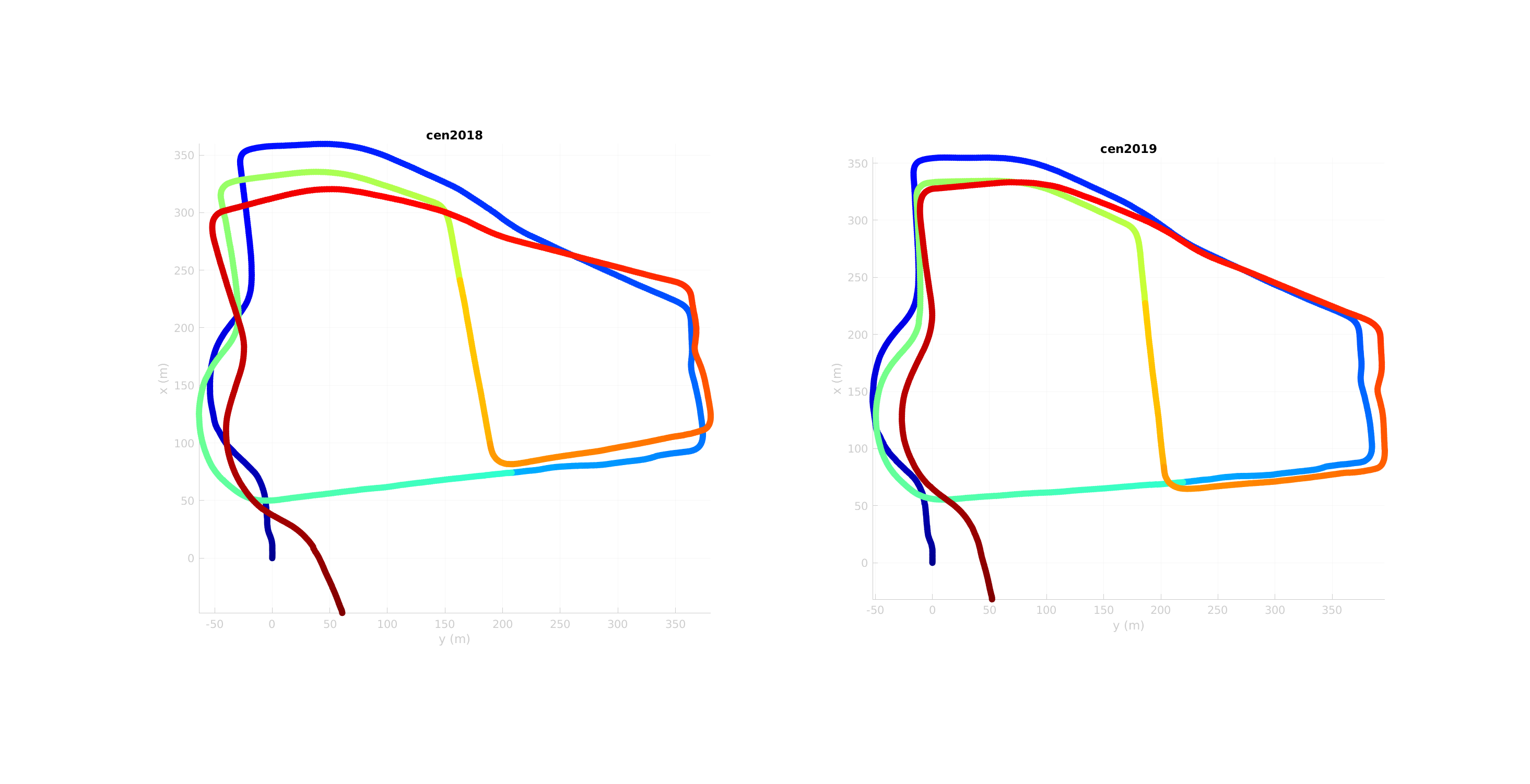
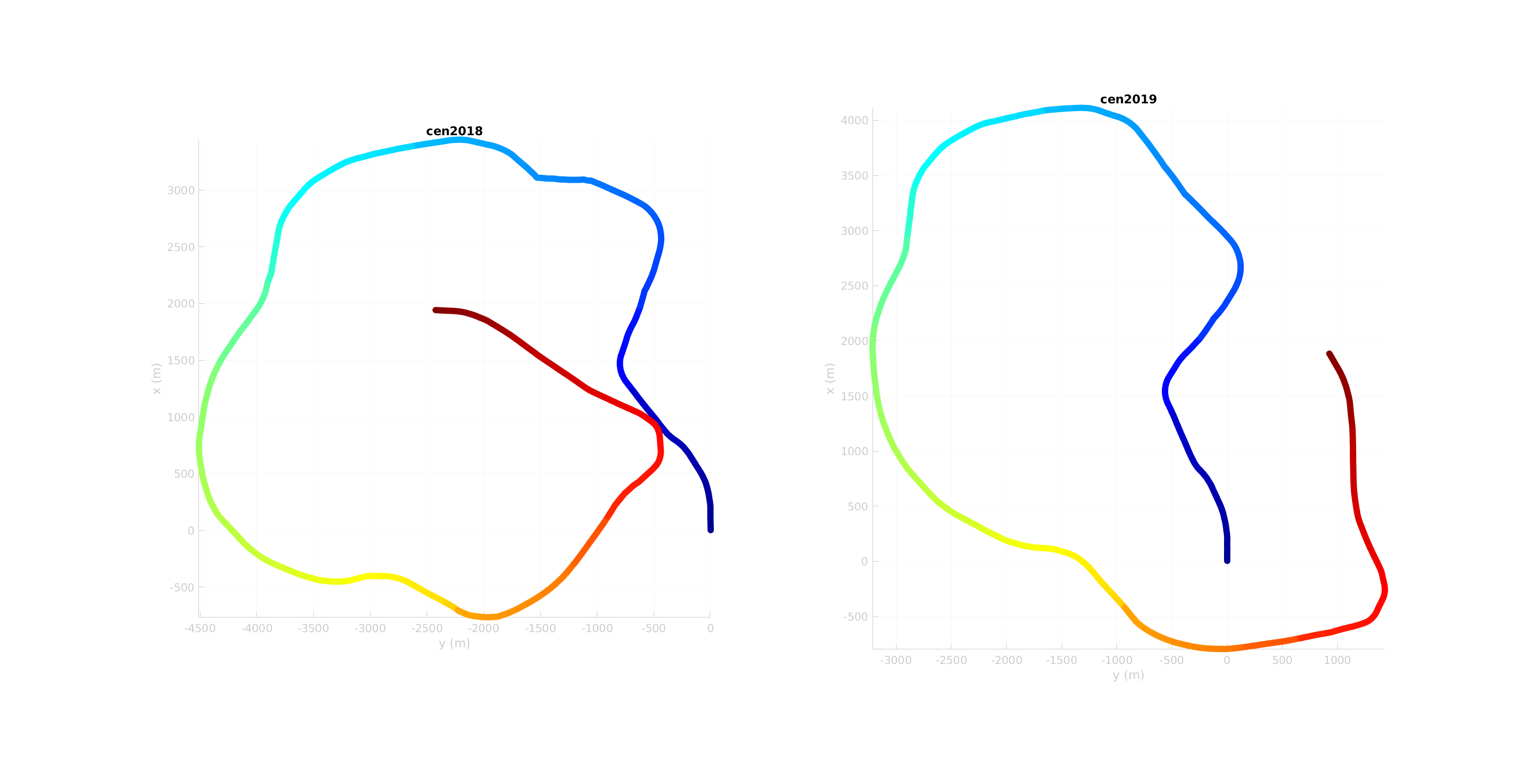
- Left: Cen2018, Right: Cen2019
- The trajectory color means start-blue and red-end.
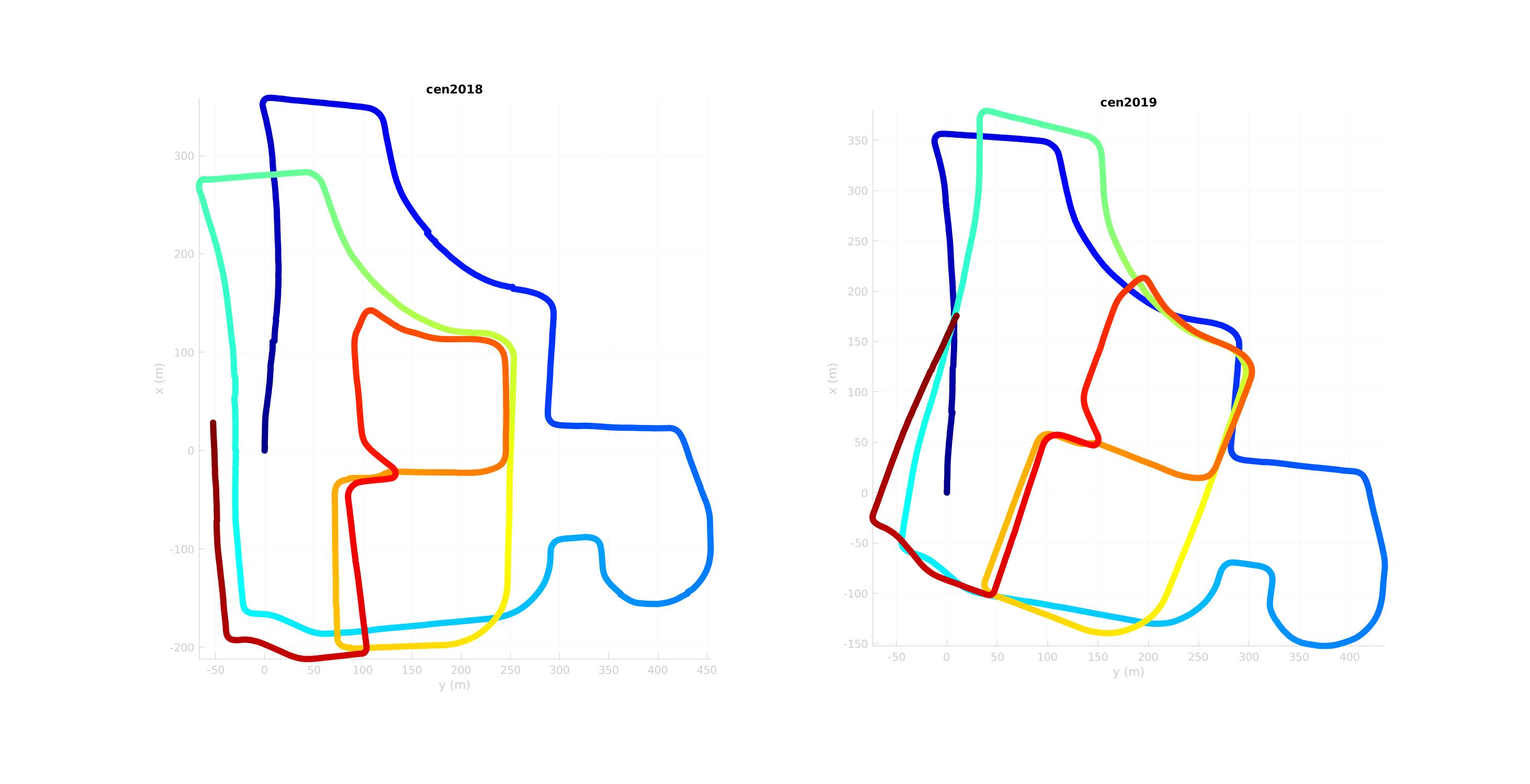 KAIST 02
KAIST 02
 KAIST 03
KAIST 03
 DCC 01
DCC 01
 DCC 02
DCC 02
 DCC 03
DCC 03
 Riverside 01
Riverside 01
 Riverside 02
Riverside 02
 Riverside 03
Riverside 03
 Sejong 02
Sejong 02
 Sejong 03
Sejong 03